Towards Robo Economicus
In game theory and economics, Homo Economicus, or “economic man,” is the rational agent that selects strategies to maximize profit and utility based on complete information. The term refers to human decision-makers and remains accurate today since the required mindset and ability to act are largely the purview of humans. But that won’t stay true forever.
We suggest that robo economicus, AI agents that can participate in markets across both physical and digital worlds, represent an upleveling of the capabilities of AI in the future. Just as engines replaced physical labor, these agents will eventually offload much of the cognitive effort required to navigate markets and systems.
These agents will manage resources and make autonomous decisions as opposed to simply following instructions.
Convergence
When emergent technologies come into the world, they arrive in a primitive state. They’re difficult to neatly categorize and only solve a narrow set of problems. Several of these technologies often exist simultaneously, but they remain siloed and limited to specific applications.
A critical shift happens when someone, an engineer, founder, or industry outsider, grasps the latent potential in combining seemingly unrelated technologies. These tech elements then collide to shatter the old order and give rise to a new landscape of applications.
Over the last two decades, we saw three siloed technologies converge in this way: cloud computing, mobile, and GPS/geolocation.
Cloud computing provided the scalability to process real-time requests and implement dynamic pricing. Smartphones had intuitive interfaces for messages and push notifications. And, once the first of Block IIR satellites was launched, GPS was introduced to smartphones, allowing for dedicated civilian use outside of military applications.
These three domains eventually converged, acting as the starting pistol for the tech era known as the “on-demand economy.” Summoning a car from a phone or delivering dinner from any restaurant, which previously demanded massive infrastructure and real-world coordination, suddenly became possible with just code and APIs.
Each tech epoch is born from and defined by a combinatorial platform shift. What then are the frontiers of computing today, and how do they intersect?
Robo Economicus
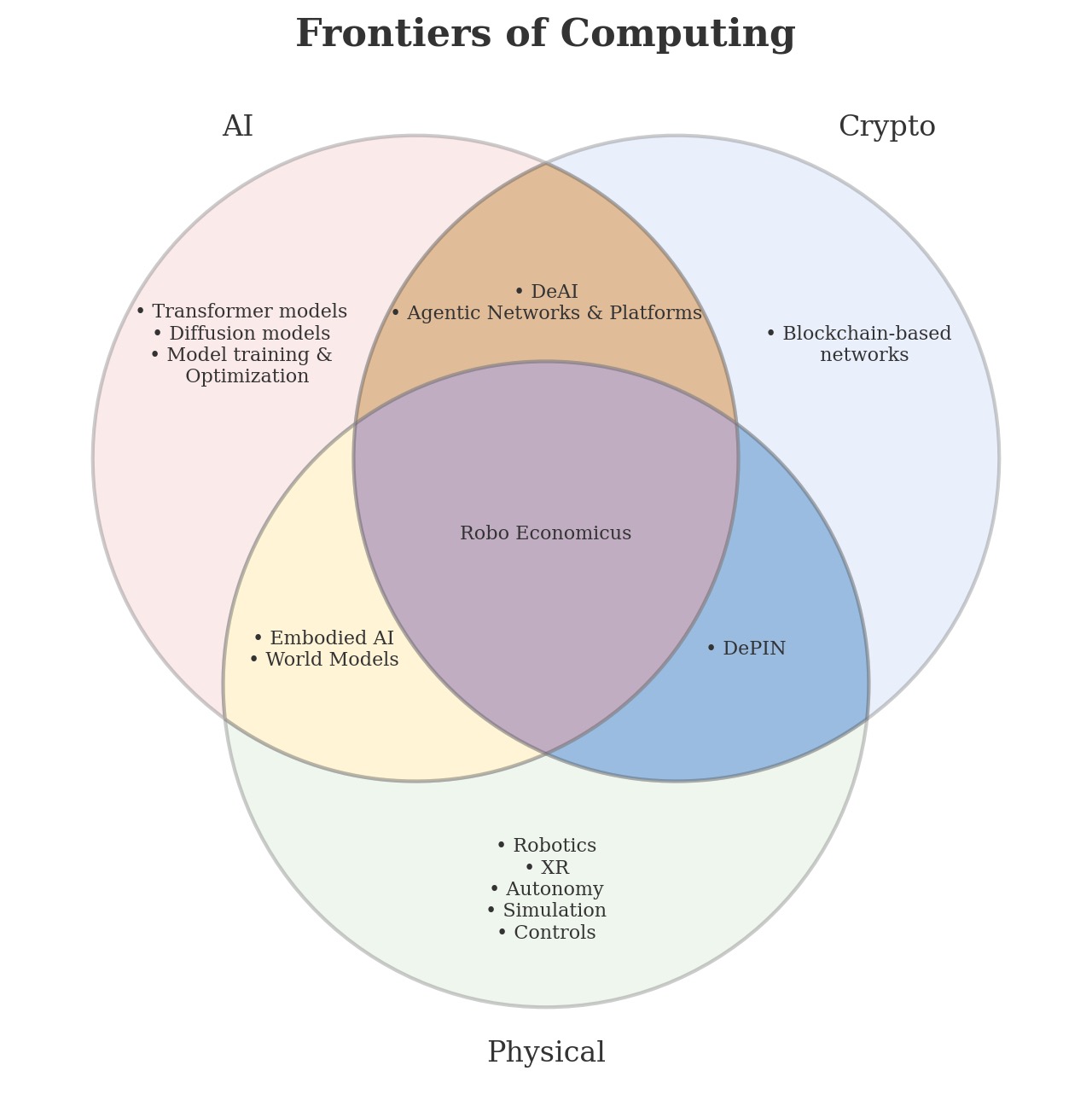
The three emerging frontiers in computing today are artificial intelligence, crypto, and the platforms enabling applications that read-write to the physical world.1 An interesting point towards which these three frontiers converge is in giving AI agents the ability to perform in domains that today are largely the purview of humans. In a sense, the convergence of AI, crypto, and physical world platforms allows agents to extend the breadth of their capabilities into new domains.
Today, there are two domains that are largely “human-only:” markets and the physical world. Markets, as they are currently constructed, require legal personhood, and interacting with the physical world requires embodiment. In their current form, AI agents have neither of these qualities. We explore here how combining AI with crypto and physical world platforms, specifically robotics, allows future agents to operate in areas that were previously off-limits.
Market Coordination
Markets consist of the mechanisms by which we communicate information, organize resources, and engage in collective decision-making. They are, in a sense, one of the most important tools in the toolkit for social coordination. Being able to perform tasks that require interacting with other agents, people, and services will require participating in markets.
Robots will not operate in isolation. To establish a baseline, there are several different types of multirobot coordination systems:2
- Centralized coordination where a single central controller plans and assigns tasks to all robots. As systems become more complex, central coordination quickly becomes computationally infeasible.
- Behavior-based coordination where coordination emerges through predefined robot behaviors, triggered by environmental stimuli. Behavior-based coordination is optimal for real time, reactive tasks in dynamic environments where simplicity and immediacy are critical, like collision avoidance. A popular subset of behavior-based coordination is swarm coordination where robots use simple local rules to achieve collective behavior, ex: drones.
- Market-based or auction-based coordination where robots act as economic agents in a virtual market, “bidding” for tasks or resources based on their efficiency in performing them. Tasks are allocated based on bids.
Robots use different coordination systems depending on their goals. Autonomous robots that have parity with humans will have to engage in complex decision-making in dynamic environments, particularly around resource allocation. The optimal way to do this is by leveraging a market-based system. Market-based coordination is ideal for autonomous decision-making robots because it allows them to independently assess tasks, allocate resources intelligently, and quickly adapt to dynamic environments: all of which would be too slow and computationally expensive at scale via centralized coordination.2
But what will robots in market-based coordination systems transact with? They cannot participate in financial markets, nor can they bid on auctions. The way we have constructed markets today requires personhood: AI agents cannot get a bank account, nor can they make payments without human oversight or dependency. Even if Visa or traditional payments processors were to offer a workaround that involved human intervention, it would not be enough for reasons we’ll explore below.
Multirobot coordination systems will need to use cryptocurrencies.
For most people in the Western world who enjoy relatively stable economies, crypto’s properties are seen as nice-to-haves. Properties like immutability, decentralization, censorship resistance, near-perfect uptime, and permissionlessness are intellectually interesting. Assets with these features are “worth having exposure to” but are not critical to everyday transactions. People in the US are as likely to pay for their morning coffee with crypto as they are with NVIDIA stock, and the majority of people who can use fiat will continue to do so.
Fiat works fine. It’s convenient, accepted everywhere, and digital. More importantly, it’s what everyone else uses. That’s why companies stick with it: end-user preference drives the decision. If your customers want to pay with PayPal or Visa, you let them.
But the dynamic changes when we put robots that need to transact and coordinate autonomously into the world. Here, the payment method isn’t decided by end-users; it’s decided by developers.
Developers building and programming robots for multirobot coordination systems will optimize for different things than end-users, such as uptime and immutability. A network of robots that can’t transact and complete tasks due to a payment processor outage is, for now, an inconvenience but at scale will be an operational disaster. And developers don’t want to have to retool their robots every time a payment processor changes their API or a new anti-fraud practice rolls out. They will want something that is immutable.
Further, robots will not solely be confined to US borders. As a global technology, developers will need a system with seamless cross-border capabilities, something crypto uniquely provides. Robots can’t operate efficiently if they’re slowed down by currency conversions or caught up in the local regulations of the world’s 400+ jurisdictions. A permissionless system that’s global, consistent, and always on will win. Ultimately, it’s not about popularity, ideology, or familiarity, it’s about what works best.
Physical World Actions
Beyond social coordination, the physical world is where many of the most important processes for a functioning society take place: the manipulation of matter, the harnessing of natural resources, and foundational infrastructure for survival and prosperity. Verticals like energy, industrials, agriculture, mining, defense are domains where major unlocks are ultimately realized via interactions with the physical world. Similarly, advancing human frontiers like multiplanetary expansion and fusion to materials science requires AI that can physically interact with the world to fully leverage its capabilities.
The role of AI in robotics over the last decade can be characterized as a move towards bringing more and more of the robotics pipeline into neural networks. Initially, higher-level processes like perception, task planning, and motion planning were subsumed by neural networks. More recently, teams are working on bridging neural networks to robots’ low-level controls. The goal is end-to-end robot learning: taking sensor input and directly outputting robotic action. This is also how the idea of a “robotics foundation model” is generally articulated. In bringing more of the robotics platform into neural networks, this work opens the door for AI agents to more effectively expand their action space to physical actions and control of physically actuated machines.
Embodied AI extends far beyond humanoid robots or quadruped robot dogs. It includes all physically actuated devices: from drones and autonomous vehicles to mechanical machines, operating individually or in coordinated groups. An embodied AI agent should be able to take inputs from some sensor, reason about it autonomously, and independently take action by controlling some physical actuation. This embodiment enables agents to no longer be limited to orchestrating or simulating the physical world (after all, disembodied AI may still be capable of perceiving and reasoning about the physical world), and allows them to extend their agentic behavior into actions in the physical domain.
Embodiment and Intelligence
Embodied AI agents could be used for many physical world use cases that require planning ahead and long-horizon reasoning. These range from household tasks like food preparation or organizing objects, to inspecting and maintaining complex physical infrastructure, operating in unstructured environments like mining sites, to autonomously operating construction sites. Whereas the current level of abstraction with which we talk about what robots do is tasks, these agents may increase that level of abstraction and instead work towards a goal by reasoning and planning their own physical tasks, much like the promise of AI agents in digital tasks and information work.
Embodiment is not only essential for interacting with the physical world, but also for perceiving and reasoning about it. The embodiment hypothesis argues that intelligence emerges from the bottom up, contrary to the view that reasoning about physics and the physical world emerges from language. Much like how a human child learns sensorimotor control and how to interact with the physical world before learning language and higher level reasoning, this perspective suggests that artificial intelligence capabilities emerge in the same way – robots understand the world by interacting with it. In this sense, physical embodiment allows AI agents to not only be able to interact with the physical world, but also comprehend and reason about the world in a more complete manner.
If the above seems too speculative, it’s because only two of three frontier compute technologies today solves a narrow set of applications at their intersection. It will take the convergence of all three to unlock net new applications. Let’s consider what’s already unfolding where any two of these domains overlap today.
Intersections
Across artificial intelligence, crypto, and physical world platforms, there are areas where these different frontiers are mutually enabling, unlocking applications or domains via their intersections.
AI x Crypto
There are a few rising product categories at the intersection of crypto and AI, tackling different layers of the stack.
Agentic Networks
Near the top: agentic networks that give AI agents the ability to participate in financial markets. True AI agents aren’t just chatbots; they are dynamic, make complex decisions, and collaborate across systems. AI agents can’t provide proof of personhood to apply for bank accounts, but they can set up crypto wallets to transact. Crypto also allows them to transact across jurisdictions without currency conversions or traditional banking restrictions. Leveraging crypto for identity solutions to authenticate bots as agents also falls into this scope. These abilities are laying the foundation for decentralized marketplaces where AI agents can operate and earn, along with frameworks for autonomous asset management and decision-making. It’s not just about making AI smarter: it’s about building new kinds of economies.
DeAI
Lower in the stack is DeAI, where we’ll start with decentralized inference. Decentralizing inference solves key problems with reliability and cost. Instead of sending your data to a central server or a distributed network of servers under a central entity, you can send it to a trustless decentralized network of servers, avoiding a single point of failure and minimizing counterparty risk. Additionally, as zero-knowledge becomes more efficient, complete privacy over your data is increasingly possible. Open-source models are almost on par with closed-source models, but most people still run them on centralized platforms which introduces unnecessary vulnerabilities. A decentralized approach lets you run these models without giving up control of data to a centralized entity, which means better security and overall robustness.
We’re seeing early signs of a trend in this direction in general tech as well: in 2024, Elon Musk suggested using the compute power of idle, parked Teslas for inference tasks.3 His idea is to onboard computers and draw up to a kilowatt from each car’s battery, making use of a compute resource that would otherwise go to waste. We’re also seeing a decentralized approach to traditionally centralized modes of development, like training, finetuning and compute more broadly, for example the Psyche network by Nous. Some companies are building this at scale for enterprise using federated learning on crypto rails.4
Data Collection and Generation
Quality data, at scale, is a prerequisite for AI model optimization and training. The massive leap in the performance of autoregressive language models in the latter half of 2023 was almost entirely driven not by architectural improvements, but by better data curation strategies. The trillion-dollar language modeling industry is predicated on the existence of a massive dataset, the Common Crawl, which is the output of a decentralized group of users (the entire Internet) since the early 2000s. Since model architectures are open-source and the cost of compute will continue to decrease, what will define the next industry leading AI company will be data sources and data strategy. Crypto platforms designed around incentivizing data collection, labeling, and ensuring data quality through slashing are streamlining collection of this data for AI organizations around the world.5
Crypto x Physical
DePIN, or decentralized physical infrastructure networks, solve two of the hardest problems in infrastructure: 1) allowing for dynamic supply in response to changing demand and 2) bootstrapping something that requires massive upfront investment. Instead of one company spending billions before seeing any return, these networks let thousands of small players contribute pieces of the infrastructure, coordinated by a blockchain. The ingenuity lies in how these networks handle incentives. Contributors get paid in network tokens, which become more valuable as the network grows. This creates a positive feedback loop: early contributors are basically betting on future growth, but their participation is exactly what drives that growth.
Filecoin, which predates the formal popularization of DePIN, originally showed a mechanism like this could work for storage. They solved the trust problem (how do you verify someone’s actually storing files) with cryptographic proofs, and the coordination problem (how do you match elastic supply and demand) with token incentives. What’s fascinating is how this design also worked for other things like Helium for wireless coverage or Hivemapper for mapping data.
The idea here is that any infrastructure business that traditionally required huge capital investment can potentially be rebuilt by disaggregating the infrastructure layer and letting it self-organize through market incentives. Similar to how Linux showed us we could build an operating system through distributed collaboration, DePIN shows us we can do the same with physical infrastructure.
This isn’t a one-off marketplace; it’s a fundamental shift in how we build large-scale systems. The hard part used to be getting enough capital concentrated in one place. Today it’s about designing the right incentive mechanisms to coordinate distributed resources.
Physical x AI
While much of the attention in the current AI wave is focused on language models and high-level reasoning, there are a number of parallel fields of work around extending AI to understand and engage with the physical world.
One instance of AI’s encroachment upon the physical world is in embodied AI, where AI is able to perceive and interact with the physical world via embodied agents (i.e. robots). For instance, a system would take sensor inputs across a variety of modalities (vision, radar, lidar, etc.) from its physical environment, and output an action that is translated to low-level controls of robot actuation. Many teams are pursuing a thesis that the same scaling laws we saw in language models and other modalities will also apply to robotic actions, and capabilities will emerge by scaling data and compute. The goal here is to work towards broad, general “robotics foundation models” that can bring autonomy to all manner of robotics tasks, especially in manipulation tasks.
The promise of embodied AI is making all types of machines autonomous: from cars to heavy machinery to drones to maritime vehicles and more. Whether it’s the current work in approaching robot learning via scaling, or applying previous generations of autonomy to new domains (e.g. maritime), machines (e.g. heavy machinery), or applications (e.g. drone swarms), the intersection of AI and physical world platforms is in enabling autonomy in all manner of physical machines.
Enabling AI to understand the physical world also has significant implications for robotics and beyond. The development of world models, which are able to model spatial environments and understand real world physics and physical interactions, can enable more capable simulation of robotic interactions and dynamics – in doing so unlocking more powerful methods of training actual embodied agents as well as modeling the physical world.
Final Thoughts
Every major leap in technology has been marked by the collapse of boundaries: from information and communication to the physical and digital. Today, we are on the brink of another collapse, as AI, crypto, and physical-world platforms converge.6 This time, the combinatorial innovation isn’t just smarter software or better tools, but entire autonomous systems that can participate in markets, coordinate resources, and engage with the physical world.
From decentralized agentic economies to embodied AI reshaping physical infrastructure, we’re seeing the outlines of robo economicus. Agents that can autonomously engage with the digital, economic, and physical worlds. Agents that can perceive, decide, and act without human mediation.
The starting pistol has been fired. What happens next will rewrite the economic and technological order.
Thank you to Oliver Hsu, Nadia Asparouhova, Elad Gil, Leigh Marie Braswell, Balaji Srinivasan, Bayley Wang, Haseeb Qureshi, Albert Wenger, Jordi Hays, Shivani Mitra, Soleio, Karan Malhotra, Jamie Pitts, and Rahul Sonwalkar for feedback and reading drafts.
Appendix
1Three Frontiers
- AI: Advancements in transformer models and diffusion models across modalities like language, images, and video are rapidly accelerating. These technologies have emerged from their gestation period into products that are being used by consumers, developers, and enterprises.
- Crypto: We define crypto as products built using blockchain-based networks. While censorship resistance is important, some of the more relevant crypto properties are the 1) orchestration layer 2) permissionlessness 3) incentivization and 4) immutability. Examples of crypto products and categories include stablecoins, DePIN, DeAI, Ethereum, Bitcoin, and Solana.
- Physical World Platforms: There are a number of parallel threads across fields like robotics (any physically-actuated device), perception, navigation, XR, simulation, world models, and more that can together enable applications that interact with the physical world to be built. The pieces of this platform include sensors, which give read access to the physical world; actuators, which give write access to the physical world;, and XR devices (an interface for the physical world). Examples include drones, legged robots, and autonomous vehicles across air, land, and sea.
2 https://www.ri.cmu.edu/pub_files/pub4/kalra_nidhi_2005_2/kalra_nidhi_2005_2.pdf
3https://www.flock.io/
4https://discord.com/invite/xh8vR6JVzM
5https://www.theverge.com/24139142/elon-musk-tesla-aws-distributed-compute-network-ai
6 https://openmind.org/report.pdf
Disclaimer: The opinions expressed in this article are for informational purposes only, you should not construe any such information or other material as legal, tax, investment, financial, or other advice. Nothing contained on this site constitutes a solicitation, recommendation, endorsement, or offer by Volt Capital or any third-party service provider to buy or sell any securities or other financial instruments in this or in any other jurisdiction. All content on this site is information of a general nature and does not address the circumstances of any particular individual or entity.